5. Spécifications Matérielles
5.1 Analyse fonctionnelle: SADT
Niveau 0: Vue globale
Commande du kart électrique
Niveau 1: Fonctions principales
Alimentation
Gestion puissance
Contrôle
Régulation vitesse
Protection
Sécurité circuit
Niveau 2: Détails techniques
Convertisseur
DC/DC
Driver
Commande IGBT
Capteurs
Courant/tension
Logique
Contrôle PWM
5.2 Nomenclature des composants
| Matériel | Valeurs | Quantité | Prix |
|---|---|---|---|
| C1 | 680uF | 1 | 0,5 |
| C2 | 100nF | 1 | 0,1 |
| C3 | 390nF | 1 | 0,2 |
| C4 | 15nF | 1 | 0,15 |
| C5 | 3,9nF | 1 | 0,12 |
| C6 | 1000uF | 1 | 0,8 |
| C7 | 390nF | 1 | 0,25 |
| D1 | D | 1 | 0,05 |
| D2 | LED | 1 | 0,3 |
| F1 | Fusible | 1 | 0,6 |
| Total | N/A | N/A | 16.22 € |
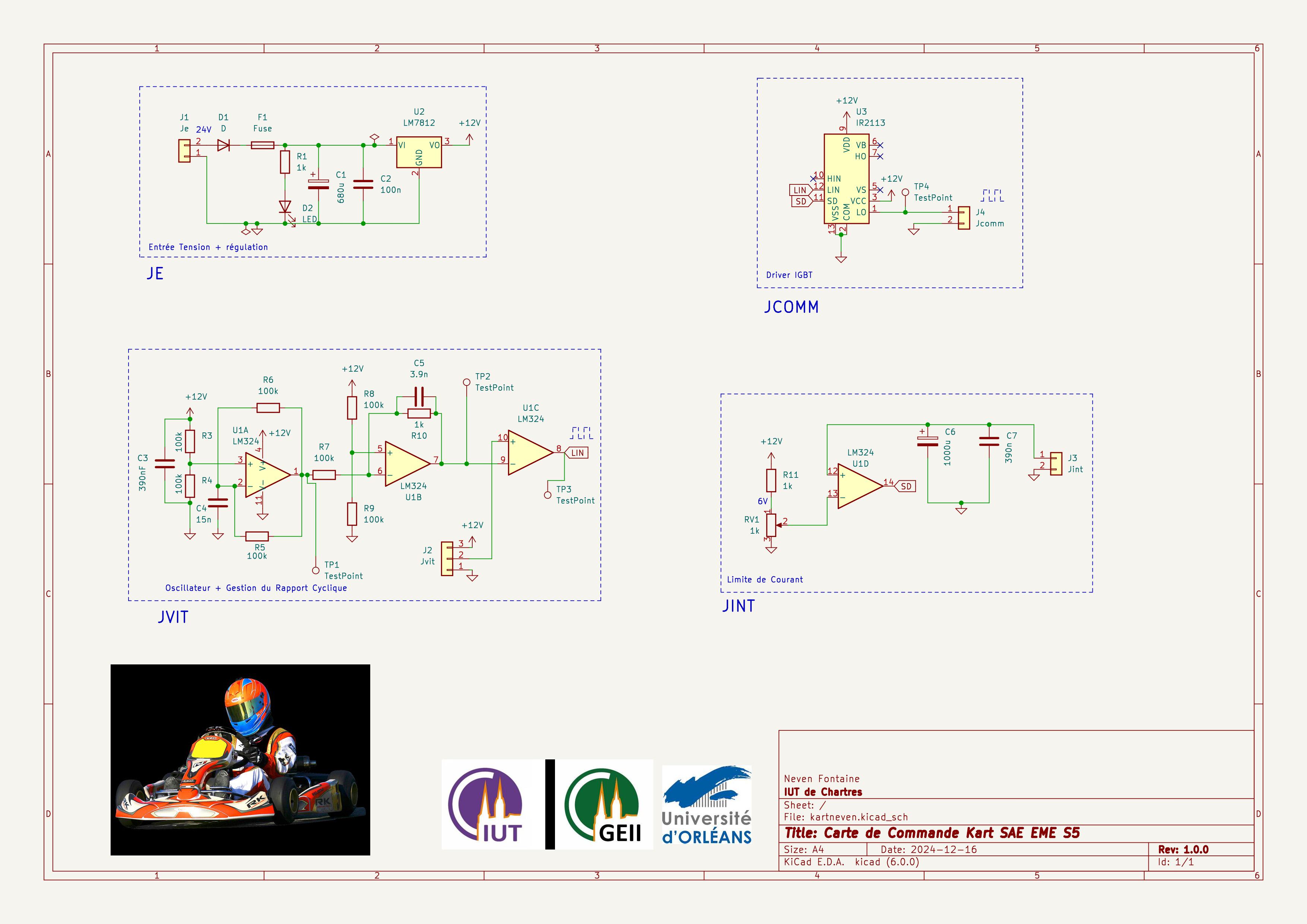
5.3 Schéma électrique